

MB109
คุณสมบัติสินค้า:
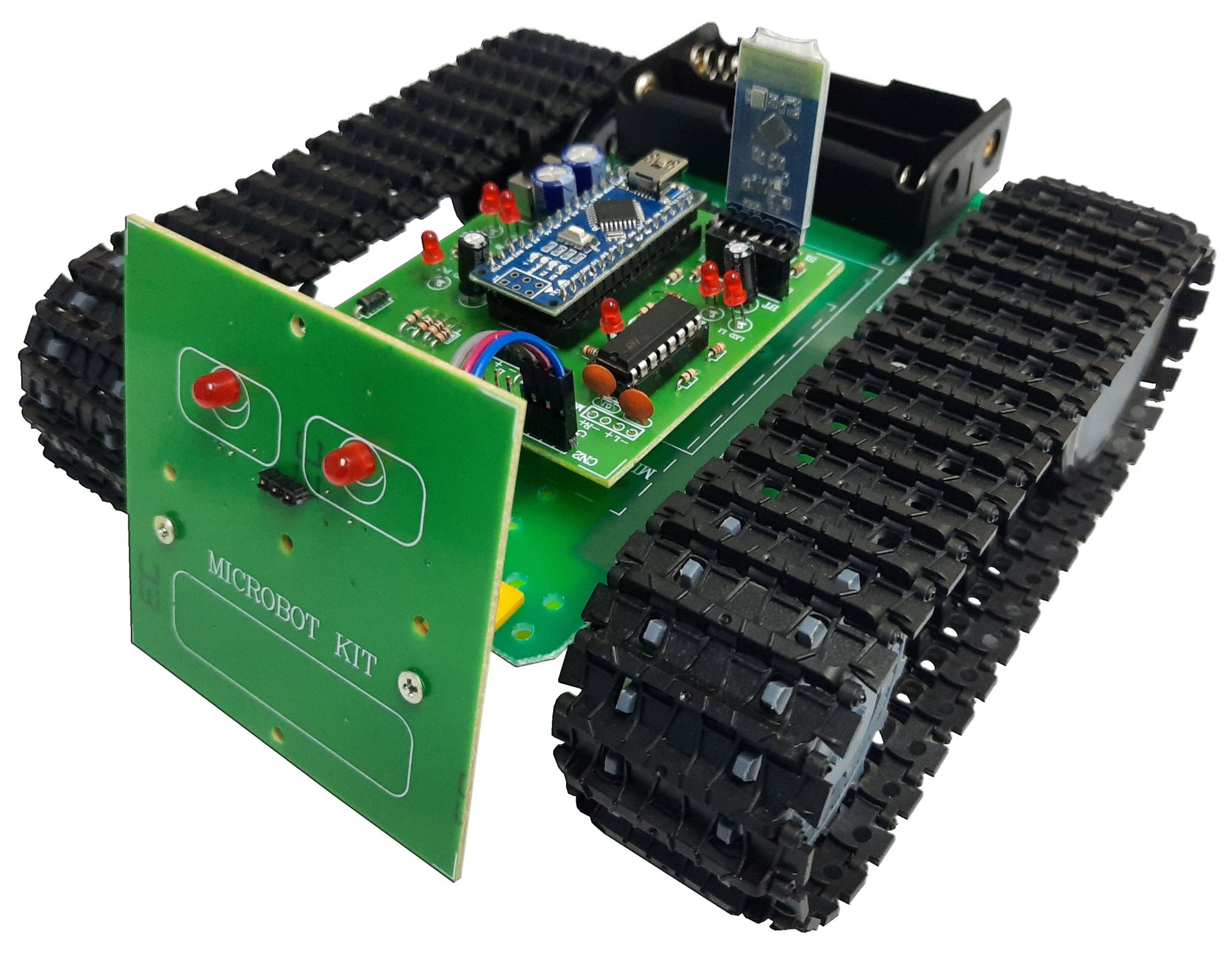
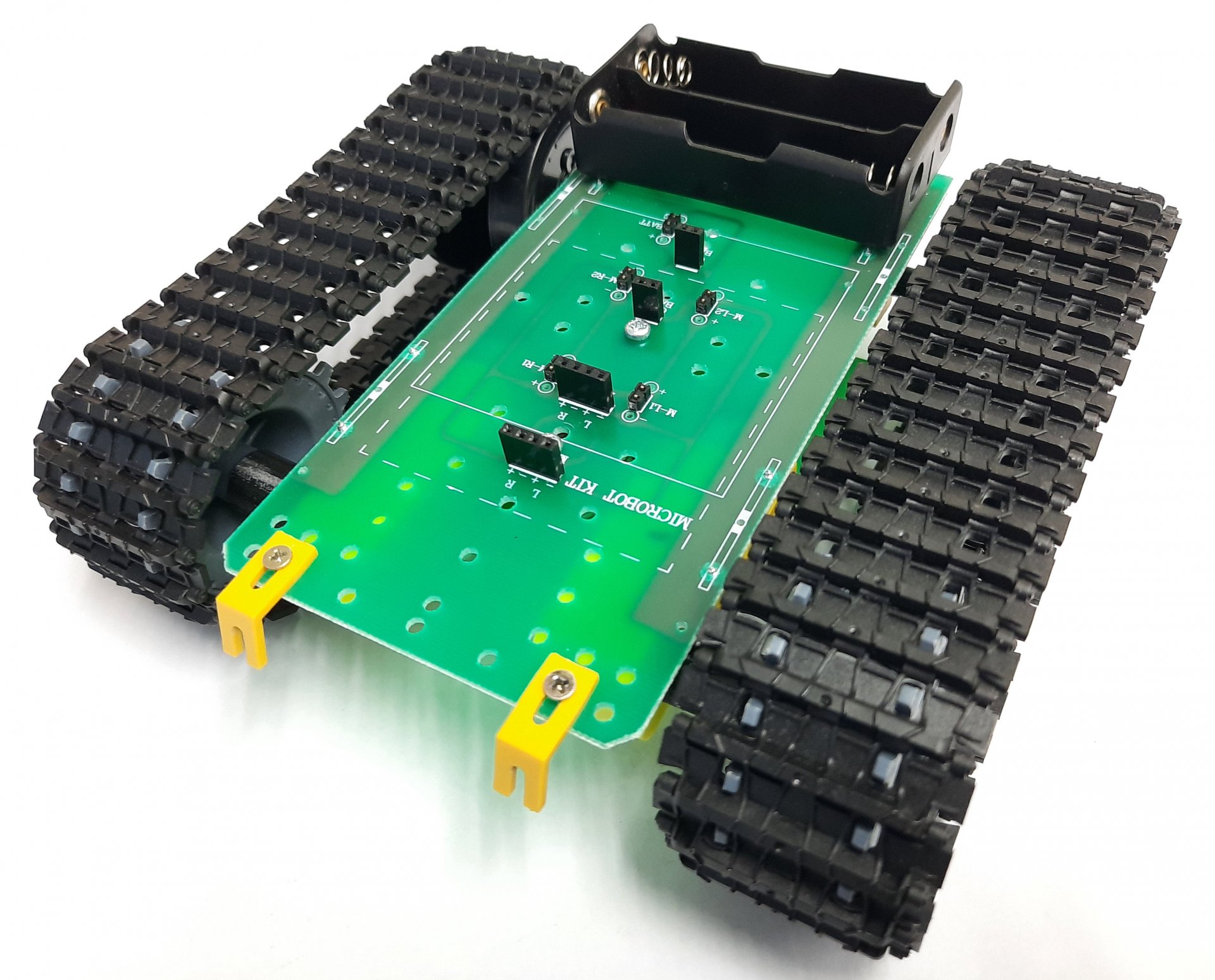
หุ่นยนต์ MICROBOT รถถังตีนตะขาบ เขียนโปรแกรมและควบคุมด้วย Bluetooth
หมวดหมู่ : MicroBot Kit , หุ่นยนต์ไมโครคอนโทรลเลอร์ ,
Share
หุ่นยนต์ชุดนี้ควบคุมแบบไร้สายโดยใช้ระบบขับเคลื่อนแบบตีนตะขาบซึ่งช่วยให้การขับเคลื่อน ไปในพื้นที่ที่ยากลำบากทำได้ง่ายขึ้น ทำให้ได้เรียนรู้เกี่ยวกับการขับเคลื่อนแบบสายพานส่งกำลัง ซึ่งมี ความแตกต่างจากระบบขับเคลื่อนแบบล้อ นอกจากนั้นยังได้เรียนรู้เกี่ยวกับการใช้สัญญาณบลูทูธเป็น สื่อกลาง ในการควบคุมการทำงาน ซึ่งข้อดีของบลูทูธ คือ กินพลังงานต่ำกว่าระบบไร้สายแบบไวไฟ และยังเป็นที่นิยมในการใช้สื่อสารกับโทรศัพท์มือถือ นอกจากนั้นการเขียนโปรแกรมควบคุมการทำงาน และแอพพลิเคชั่นยังง่ายกว่าระบบไวไฟ ดังนั้นจึงเหมาะสำหรับผู้ที่เริ่มเรียนรู้ระบบไร้สายอย่างมาก
โมดูลบลูทูธที่ใช้กับหุ่นยนต์ชุดนี้ จะใช้รุ่น JDY33 เป็นโมดูลบลูทูธที่สามารถติดต่อสื่อสารได้กับ อุปกรณ์ได้หลากหลาย เช่น เครื่องคอมพิวเตอร์, โทรศัพท์มือถือระบบ Android และระบบ IOS โดยจะ ทำงานที่ความถี่ 2.4GHz รุ่นของบลูทูธเป็นรุ่น 3.0 SPP+BLE4.2 ความเร็วในการรับส่งข้อมูลแบบ SPP สูงสุด 16K bytes/s และแบบ BLE สูงสุด 4 bytes/s ระยะทางในการรับส่งสูงสุด 20 เมตร (ในที่โล่ง) กำลังส่งสัญญาณสูงสุด 6db ความไวในการรับสัญญาณ -96dbm
บอร์ดที่ใช้ในการควบคุมการทำงาน จะใช้บอร์ด Nano V3.0 โดยภายในจะมีไอซีไมโครคอน- โทรลเลอร์เบอร์ ATMEGA328 เป็นไอซีหลัก มีหน่วยความจำแบบแฟลชขนาด 32KB SRAM 2KB EEPROM 1KB นอกจากนั้นที่บอร์ดยังมีไอซีแปลงสัญญาณ USB เป็น UART เพื่อใช้ในการเชื่อม ต่อกับคอมพิวเตอร์สำหรับโหลดโปรแกรมควบคุมที่เราเขียนขึ้น ผู้ใช้สามารถเขียนโปรแกรมควบคุม ผ่านโปรแกรม Arduino IDE ได้ ด้วยคุณสมบัติที่กล่าวมา จึงสามารถนำไปพัฒนาสู่การสั่งงานผ่าน ระบบอินเตอร์เน็ตหรือที่เราเรียกว่า Internet of Things หรือ IoT ได้ในที่สุด
นอกจากที่ผู้ใช้ได้เรียนรู้เกี่ยวกับการเขียนโปรแกรมควบคุมแล้ว ยังได้เรียนรู้เกี่ยวกับระบบแม็คคานิกส์ต่างๆ เช่น การทำงานของมอเตอร์เกียร์และสายพานส่งกำลัง, เรียนรู้การสร้างแอพพลิเคชั่น เพื่อใช้ ในการควบคุมหุ่นยนต์และเรียนรู้การทำงานของวงจรอิเล็กทรอนิกส์
ข้อมูลทางด้านเทคนิค
- ใช้แหล่งจ่ายไฟ : 7.4-8.4 โวลท์ดีซี (ถ่านขนาด 18650 จำนวน 2 ก้อน)
- กินกระแสประมาณ 760 มิลลิแอมป์
- สามารถใช้แอพพลิเคชั่นบนโทรศัพท์มือถือควบคุมหุ่นยนต์ได้ผ่านระบบบลูทูธ
- ใช้โมดูลบลูทูธ รุ่น JDY33 ในการเชื่อมต่อสัญญาณ
- แอพพลิเคชั่นที่จัดทำไว้ ใช้ได้บนโทรศัพท์มือถือระบบ ANDROID ไม่เกินเวอร์ชั่น 10
- ขนาดแผ่นวงจรพิมพ์ของวงจรควบคุม : 2.56 นิ้ว x 2.76 นิ้ว
- ขนาดของหุ่นยนต์ (กxยxส) : 172 x 180 x 95 มม.
- น้ำหนักรวมของหุ่นยนต์ (ไม่รวมถ่านไฟฉาย) : 350 กรัม
- ใช้ระบบขับเคลื่อนแบบสายพาน
- ตัวหุ่นยนต์ใช้แผ่นวงจรพิมพ์แบบ Epoxy
- ใช้มอเตอร์เกียร์ทั้งหมดจำนวน 2 ตัว
- คุณสมบัติของมอเตอร์เกียร์ที่ใช้
1.ขนาดแรงดันไฟฟ้า : 3-6VDC, 120mA@6VDC (ขณะไม่มีโหลด)
2.ความเร็วสูงสุดของมอเตอร์เกียร์ (ขณะไม่มีโหลด) : 120-240rpm/min
3.อัตราทด : 1:48




{kind=link}